Note: PDK is the Porsche’s name to his dual clutch gearbox, and 997 is the generation (5th and actual).



Below you can find a more accurate description of the mechanisms


As fast details, the car weight 3.65kg, with around 3500 parts and more than 6 meters of wires

Final dimensions: 74 studs length, 31 width and 22 of height.
The car maintains all proportions of the real 911, either some of them hard to believe for example:
- the steering wheel axle is up to 22 degrees from the horizontal, as the real 911.
- the steering wheel turn exactly 2.6 laps, as the real 911.
- have a axle load weight, in 40% front and 60 rear(1460/2190gr), as the 911 Turbo Cabriolet version.

- 3 PF controllers
- 3 IR PF Receivers
- 2 RC motors
- 1 PF XL motor
- 5 PF M motors
- 3 PF lights
- 2 Lithium batteries
- 1 PF switch
- 3 PF wires 50cm
- 3 PF wires 20cm
The use of each element will be described in the next article.
Both lithium batteries are inside the front axle, there is the boot too, with 5x11x6 studs you can hold a PF controller.

For turning on or off the batteries is not necessary to open the hood, you only have to push a little lever located on the left side of the steering wheel.

Just in front of the co-pilot seat you can see a lever to open the hood.


The doors have a real lock, to open them just click the handle and will open smoothly. To close it, you only need push it and it will self-lock.


As outstanding remote controlled features:
- Front steering with working steering Wheel
- Front and rear lights
- Rear retractile and adjustable spoiler
- Folding top
- Handbrake
- Disc brakes with rear lights
- Dual clutch gearbox with 7+R speeds and auto-selection clutch
- Independent strenght clutch
- Remote progessive accelerator
The folding top and spoiler secuence.




Possibly, the most “wanted” photo for Lego Technic followers:

For finish a little video:
Complete Chassis
I have also copied (within the Lego limits) the structure of chassis and axle designs.
Unibody Chassis
Here you can see the car's unibody chassis, which is the most important and the more complicated part. It is very rigid and light.

Front axle
I have designed a McPherson as the 911 use. It has suspension, steering, disc brakes and drive.

Also this axle includes other mechanical features:
- Camber angle (~2 degrees)


- Caster angle (~3.36 degrees)

Rear axle
This is a multilink axle type, as the 911 uses, which is much more realistic and also allows me to get away from the typical double-arm axles used in almost every Technic MOC. As extra feature this axle has camber angle(1 degree).

If you want more information about the chassis follow this link: SuperCar 2011 - Chassis
Gearbox and transmission
For describe more easily how the transmission works, I will go from drive motors to the wheels.
To start with, the transmission sequence has changed, from real:
- Engine -> clutch -> gearbox -> transmission -> wheels
to:
- Engine -> gearbox -> clutch -> transmission -> wheels
I’ve done it this way to keep the gearbox turning in every moment, so the transmission operates more smoothly.
Drive motors
For drive I have used two RC motors, because this combination is smaller than using 4 XL motors.
Each motor is connected to a battery (you can not connect 2 RC motors to one battery without electrical cut).
The motors send the transmission to the gearbox and to the fake engine, the classic Porsche Boxer-6.
Gearbox
As I previously said, I have used a dual clutch gearbox (Porsche’s PDK).
Really dual clutch gearboxes are two gearboxes, one with even speeds and reverse (R, 2nd, 4th and 6th) and other with odd speeds (1st, 3rd, 5th and 7th)
Here you can see gearbox structure:

Also I have copy the speeds ratio (or very close…).
A little graphical comparison between the real gearbox ratio and my MOC version (start with 1st=1):

The gearbox has a speed indicator over it. In any moment you can know the selected speed.
Clutches
I decided to do the never-done-before: radio-controlled friction clutches. Obviously the car has two of them, one behind each seat.
Probably, the mechanism for controlling them have been the most complicated challenge I’ve ever had.
Here you can see a little picture with clutches design:
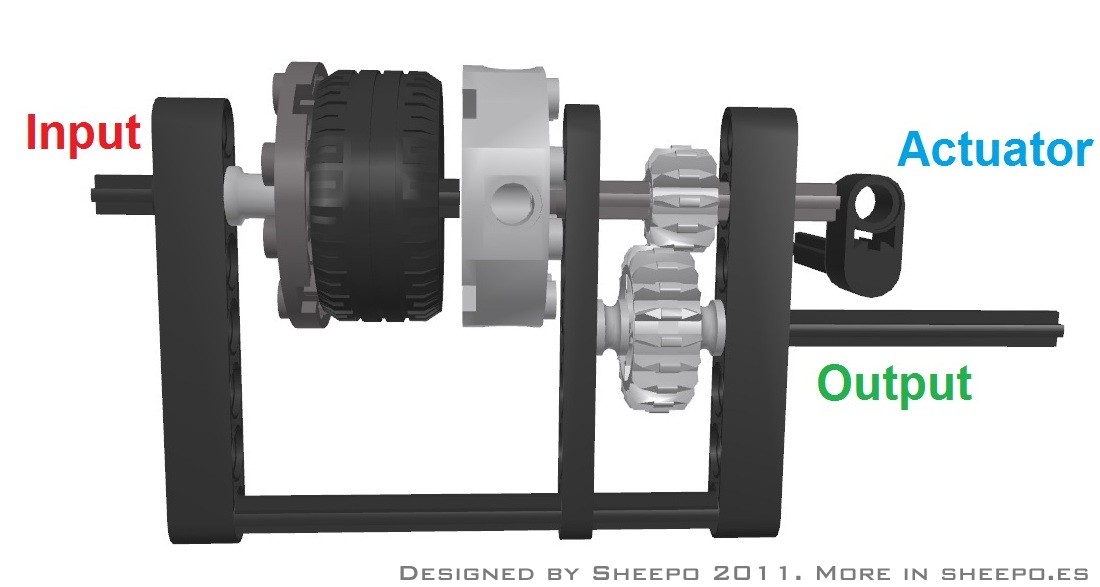
Clutches working
Clutch selection comes from gearbox through some mechanism and finished in the corresponding clutch.
And now, the best part of the car: the strength to push the clutches don’t comes from gearbox, comes of secondary motor, controlling this motor you can control the car movement, regardless of the accelerator, as a real clutch pedal!!!
While you keep the secondary motor working, the corresponding clutch will be connected, so when you let it go, the clutch will self-disconnect and the car stops.
After the clutch, the force goes to central diff, and from there to the axles and wheels.
I know that is very strange, now I am filming a video with all features working.
Accelerator
To avoid having to keep two functions pushed at the same time, you can select a velocity for drive motors.
Both motors velocity are controlled by the integrated regulator in lithium batteries, this last one is controlled by an M motor from the remote control. Another way to make that is using a train controller, but that forces me to use a forth IR receiver.
In this picture you can see the regulator gears:
The front and rear lights works at the same time that motors.
The mechanism has a cap to prevent the motors turn in opposite direction. If you want to go back, you should select reverse in the gearbox.
Brakes
The car uses a disc brakes system in all wheels. The brakes are actuated by the same motor which actuated the clutches
You can see more pictures here:
http://www.brickshelf.com/cgi-bin/gallery.cgi?f=471737
I hope you like it!!!
94 comments:
Excellent work!
Let's hope you'll post a video with all the working PF-functions too!
Now I am editing the video and writing other article with the transmision system. Thanks for write!! :)
Now all it needs is sariel's indicators! :P
You said "I hope you like it", you could have said "I know you like it!" ;)
Awesome!
In the table I'm sitting at there are 3 future mechanical engineers. We have this to say: You are the boss.
thank you sir
PS: we have no idea how you could possibly make a dual clutch 7+R speed working with Legos... seriously? that's just awesome!
Thanks to you for your commetary!!! LOL
I needed one year to find a solution for the gearbox jajaja
Hello! Awesome work!
Can you post the specs? What application you used to create the MOC virtually? What part sets you used to make it?
Lots of questions of questions I know. We are just newbies on this lego World for real MOCs and we are planning to start doing something.
Please let me know if you can help us on this begin!
Thanks!
Best regards!
Gutemberg
Congratulations. I cannot begin to imagine how much time this cost you. I wish i could buy this,
the best lego creation I have ever seen. incredibly impressive!
Just like the real thing, amazing! Also love
that it doesn't have cup holders like the real
car as well.... LOL!
Do you have instructions on how to build this? I need to have one. So amazing
This is amazing!!! great job, is this going to be on sale to everyone?
No, this MOC is not for sale anywhere.
Hey... wonderful job! Love it
I'm a great fan of Porsche and when I saw this I was on my knees. Want one.
Any chance you post the L3B? Or even better, the build instructions?
Looking at a site like bricklink, at what price would you rate this MOC?
I've spent most of the day looking at your website and got myself SR3D to play a bit.
I'm currently lurking on Lego's Unimog, looks good. What do you think of it?
Please, publish official intructions on how to build this awesome piece of art and engineering!!
Is there a driving video?
awesome but if you need a new challenge
try the laborghini gallardo ;););););););););););)
tuur
and wich is the most "wanted" picture of lego technic
sorry for double posting but I really can't see the most "wanted" picture of lego technic
tuur
Amazing!
umm how much would it be to buy it illbid 200 - 275 :D
This is just an amazing MOC!!!
I am working on my own MOC car, which should be a nissan 370z roadster at the end, but I have still a lot of work to do on it... :)
How did you manage the functions of the mcpherson suspension with the fixed shock absorbers? Did you have to manipulate it? Because based on the real mcpherson suspension, the shock absorber is able to provide steering and absorbing at the same time. But the LEGO shock absorbers cannot turn around.
Easy, go here: http://www.sheepo.es/2012/02/mps-front-axles-1-mcpherson.html
I wanted to ask if he could make the instructions on the box - for - speed of the porsche and send me to: hugo_dbn@hotmail.com.
Please!
sheepo please tell me why can not I connect 2 RC motors to one battery without electrical cut?
Because you can't do it. You can't connect more than one RC motor or 2 XL motors without electrical cut. For that this Porsche uses 2 batteries, one for each RC motor.
Hi, where is the instruction? Your YouTube description points to Megaupload URL which are not longer available.
Anyway, this is the best ever Technic MOC I have seen.
i dislike the info about the gearbox...i wanna see more, and instructions! you only had one picture of the bottom, cant you make just like the bugatti gearbox a double clutch gearbox with instructions? i wanna build it for prove and maybie a racecar...
The internal gearbox mechanism is secret, and I will not publish more info about it.
It's one of the best Lego models I have ever seen. As I can appreciate you wanting to keep the details to yourself it is a shame that only you will be able to enjoy such a wonderful model.
I liked it, I'm taking some models like that and I'm getting trying to understand and assembly as a model. Awesome :D
Great build! I'm trying to understand the brakes... but I'm having trouble :) how does the steering work and also the brakes working?
Unbelievable! Really fantastic!
HOW THE FUCK DO THE BLOODY BRAKES WORK
personally I don't like the bodywork; but all the functions are impressive, under a technical viewpoint is awesome as ever!!!
It's Amazing! It looks like real. Please put it on cuuso.
Bravosss !
This is simply amazing !!!
Any Alfa Coupé Bertone 1750 available ; )
Keep up the good work.
The brakes are simle compared to the gearbox :)
Put it on cuusoo!!!!
Please
PUT IT ON CUUSOO ID FOLLOW IT , id love to buy this :).
!!!!!!!!!!!!!!!THIS IS AWSOME !!!!!!!!!!!!!!
?????????????BUT WERE ARE THE INSTRUTIONS??????
Only exist instructions for the chasis(actualy is a SR3D file), not for the gearbox or the whole car.
the nomber one
what are the dimensions of your Porsche? thnx
my aventador will be 1:6.3
If you read the post before write, you know the scale... Also you can't made a car with this wheels in this scale. The wheels used in this car have the same diameter as the wheels you have told (81.6mm)
where does it say the scale?
are the mocs designed on lego digital designer?
thx
You can't do it, because in LDD you can't find some important parts, and the LDD doesn't say you if any mechanism can work, or if one structure will be enougth strong...
In which gear can you actually drive.
Due to the heavy weight I can hardly imagine, that you will even be able to drive in third gear, simply because your gears will slip or even break. Or the car will move extremely slowly.
Can you tell anything about that?
The car is very heavy, so you are right, actually it only can be drive up to third speed, but of course all speeds works fine.
The mini! Loooving it.The defender! Very nicely done. It has something special to it. The porsche! Just aaaawsome. The details and the functions on it are outstanding, my favorit. If i can give a idea for the next model, please go for the car from the movie Cristine, (1958 Plymouth Fury). you'r new fan mike :)
how the progresive acelerator works??
kann man den Porsche auch kaufen
Dear Sheepo,
Is the full " how to make the 997 turbo " in lego up for sale ? If so, what is the price to get the building instructions for the total project ?
Please let me know on my email:
tollenstim@hotmail.com
I do appreciate your reply
Kind regards
Tim Tollens, a huge Porsche fan !
This is totally Awesome. You should make instructions and send it to LEGO, so they may produce building sets. That would be cool!
Absolute love this MOC, it's must be the best supercar ever created, I'm trying to make my own but struggling going only by the pictures, is the model 100% lego? and if you do decide to make instructions for this will it include the internal gearbox mechanism secret?
Many thanks
FREAKIN' SWEET!!!
All seven gears plus reverse
Convertible top
Flat Six engine
All doors/boot/hood open/close
REAL ALL-WHEEL-DRIVE!!!
I'd love to make this kit and show it off...
Keep me posted whenever you get the parts list out.
Amazing work really a masterpiece.
How to buy it ?
hi Sheepo please explain to me how to brake and drive on a government agent has done?
hi Sheepo please explain to me how to brake and drive on a government agent has done?
sheepo, this is you best model imo. amazing...(sigh)
Sheepo, congratulations on this model. Just amazing!!!
Any chance we can get the instructions for this set???
Will you ever post the instructions for this and the Bugatti Veyron like you did with the Mustang Shelby? I'm really interested.
As I have said many times, I want to make instructions for all my old cars, but I need to redesign them because they are very old, and my current mechanisms work better in less space.
Hey Sheepo, I want to buy it, do you sell it?
No, I don't sell it.
Hello
Are the instructions for the porsche available?
hi sheepo could you tell me what the top speed of the Porsche is?
I think he is fast because it is driven by two rc motors but he is also heavy
Actually it is very slow. It has two RC motors, but it is very very heavy, and with tons of gears that generate many friction.
Hello, I know you don't have instructions for your Porsche, but it seems like you have a SR3D file. Would you sell that, just without instructions?
That's awesome!!!!
That's the best lego Modell ever!!!! But does it also work in 2 - 7 and Reverse gear? You didn't Show that? I don't Need a new video, I just Wanna know the truth. Thx a
It can be drive from reverse to 4th speed
can you do a instructions of this car please =) =)
Hola Sheepo sos un genio!!!! Ya hice el Land Rover y funciona de puta madre!!!! Queria saber si tu vas a hacer las instrucciones completas del Porche 911 Turbo PDK y ponerlas a la venta?
Muchas gracias!!!
Martín
Hola, siento decirte que no voy a hacer las instrucciones del Porsche. Es demasiado complejo y poco fiable para hacerlas, ademas de que el precio de las piezas hoy día sería una completa locura.
Es una pena de todos modos muchas gracias por tu respuesta, cualquier cosa si te arrepientes te pido que me envies un mensaje. Saludos!!! Martín
Wonderful work! This model has inspired me a great deal, and seeing this I realize perfection requires patience.
I am wondering: do you still have this MOC intact or has it been taken apart for later projects?
I keep all my cars assembled, including this Porsche.
Incredible work !
Could you reupload the pictures that are not viewable anymore (a lot of them sadly) ?
Hello Sheepo. These wheels are too expensive and rare. How did you get them?
Hello sheepo I think you had set 8448 because your wheel and your parts are almost the same right? Do you have a website that I can buy the wheels instead of bricklink with a cheaper price? Because I want them for my porsche 911 targa
Hey every body good news. You want to know how the braking system of sheepo's porsche work? That's so simple. Go to google search engine. Type Porsche Sheepo. Then go to videos. Then something is uploaded by kids and game zone in sep/1/2015. It said (LEGO Porsche 911 (997) Turbo Cabriolet PDK by Sheepo). It shows the picture of the front of the car. Click on it. In the first ten seconds it will show you the disk brakes working.
Hello Sheepo. I can compare my porsche with yours. Because I have brake pedal front disk brakes and rear hand brake disk brakes. 1 to 0. My folding roof works as the real targa. 2 to 1. I have automatic transmition with d+n+r+p. Using fly wheels to change gears and also pdk. 2 to 2. I have no accelerator. 3 to 2. My trunk opens automatically when the motor is on using a fly wheel. yours have a spoiler.4 to 3.I have front mac pherson and rear multilink like the real porsche. 5 to 4. My porsche is a loser. Because it has one option lost.
A lot of your images are broken.
Would be nice if you could fix it.
With kind regards
What kind of lego did you use for tail lights?
Hey Sheepo. How did you put 60% weight in the rear and 40% in the front when two lithium battery boxes?
I placed almost all motors and mechanism in the rear.
Hi, it looks like an awesome car, keep up the good work! But do u have instructions for it? I really want to get all the parts and build it
Most of the photos are missing :-(
Post a Comment